










Если вы хотите узнать больше о продукте, пожалуйста, свяжитесь со мной, WhatsApp: +86 16673975250 E-mail: [email protected] Шарнирный шарнир робота-манипулятора, серводвигатель для робота-восстановителя экзоскелета
Модель
Параметр M8010E17B50L M8010E17B80L M8010E17B100L Общий параметр Номинальное напряжение двигателя 36 В постоянного тока ± 10% 36 В постоянного тока ± 10% 36 В постоянного тока ± 10% 36 В постоянного тока ± 10% Номинальный ток двигателя 3.5A 3.5A 3.5A Выходной крутящий момент после замедления 21 НМ 29 НМ 31 Нм Вес 1 кг 1 КГ 1 кг Диапазон скоростей после замедления 0 ~ 30 об / мин 0 ~ 18 об /мин 0 ~ 18 об /мин Описание продукта
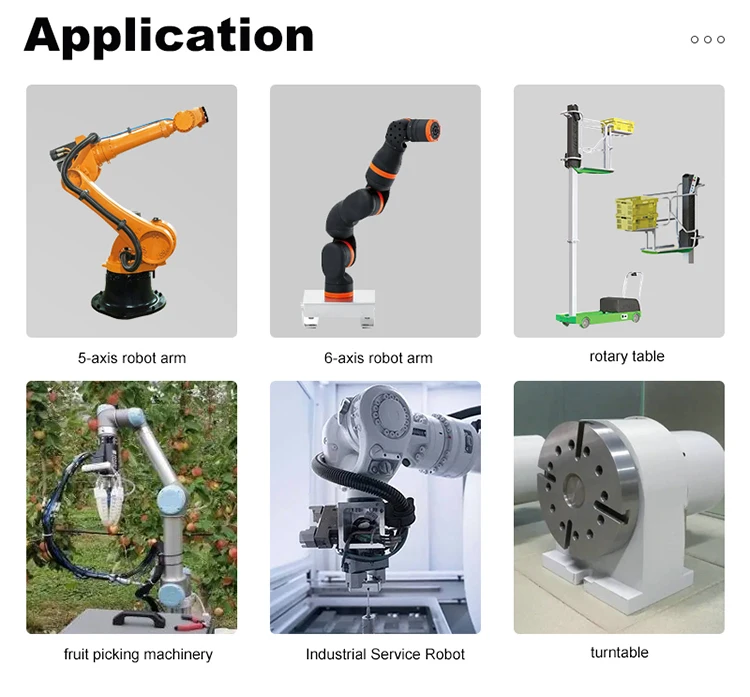
Серводвигатель привода шарнира робота малого размера OD 80 мм в основном используется для манипулятора робота, встроенного гармонического редуктора, энкодера, двигателя постоянного тока и драйвера.Серводвигатель шарнира робота может использоваться непосредственно в шарнире руки робота, что позволяет быстро создавать шарниры робота.
Характеристики продукта
1. Изолируйте коммуникации CANopen в соответствии со спецификацией CiA301 V4.2.0
A.
Поддерживает SDO, TPDO, RPDO.
B. Поддерживает скоростной режим, позиционный режим (режим контура, режим интерполяции)
C. Поддерживает выработку и потребление пульса.
2. 15-битный абсолютный энкодер, один круговой импульс до 32768.
3. Многоступенчатая конструкция двигателя DD, большой крутящий момент на выходе.
4. Гармонический редуктор, двигатель, драйвер и энкодер интегрированы.
5. Низкий уровень шума, низкая вибрация, высокоскоростное позиционирование, высокая надежность.
6. Векторное управление фокусом, ориентированное на поле, замкнутый контур поддержки положения / скорости.
7. Может работать при нулевом гистерезисе при заданном состоянии импульса после нулевого гистерезиса.
8. 16-разрядные функции электронного редуктора.
9. Предусмотрен компьютер CANopen upper, который может контролировать состояние двигателя и изменять параметры.
10. Режим позиционирования, поддержка импульсного сигнала + сигнала направления, следование кодировщику.
11. Режим скорости, поддержка регулирования скорости сигнала рабочего цикла PWM
12. Он имеет функцию блокировки вращения, защиты от перегрузки по току и перенапряжения.
13. Абсолютное значение низкого энергопотребления и многооборотного
A.
В версии для связи "все в одном" servo 485 / CAN может быть добавлена функция многооборотного управления.
B. При питании двигателя внутри имеется схема зарядки аккумулятора.
При выключенном двигателе потребляемый ток аккумулятора составляет всего 0,07 мА.
C. После отключения питания двигателя вал двигателя приводится во вращение, чтобы включить датчик и продолжить запоминание положения.
Технические характеристики
Сопутствующие товары

1 Пара тестовых контактов мультиметра, универсальный удлинитель для электрика, проволочная ручка, игла-зонд, профессиональный без зажима
описание: простое управление: эта проволочная ручка-мультиметр 10a поставляется с красной и черной проволочными ручками, которые позволяют легко идентифицировать и использовать. приложения:
367D 5 шт 10 г Тестер диабетических Моноволокон Надежная Профессиональная Полезная Ручка Тестер диабетических нитей
характеристики: оотдти этот предмет используется для контактных проверок диабетических стоп и регулярных осмотров для предотвращения образования язв и ампутаций в будущем. диагностический

Имитатор электростатического разряда В соответствии с IEC61000-4-2esd пистолет Esd Тестер Esd пистолет Цена электромагнитных импульсов
дорогой друг, благодарим вас за посещение магазина, если вам нужно больше моделей и новых товаров, пожалуйста, свяжитесь с нами и получите скидку: whatsapp: +86 17873567381 электронная почта:
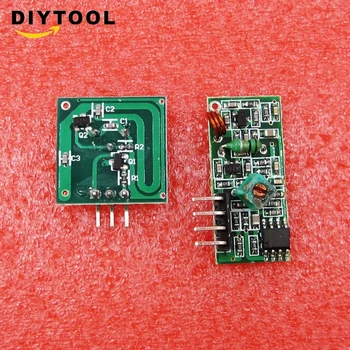
Модуль радиочастотного передатчика и приемника 433 МГц для Arduino ARM WL MCU Raspberry
параметры модуля приемника 1. модель продукта: mx-05v 2. рабочее напряжение: 5 в постоянного тока 3. ток покоя: 4 ма 4. частота приема: 433,92 мгц 5. чувствительность приемника:-105

1 ~ 5ШТ В 1 Тестовая Бумага Инструменты Для Тестирования Воды Тестер Качества Питьевой Воды В Бассейне Полоски Для измерения РН Тестовой Бумаги Твердость Железа Меди
1 ~ 5шт в 1 тестовая бумага инструменты для тестирования воды тестер качества питьевой воды в бассейне полоски для измерения рн тестовой бумаги твердость железа меди описание: 100%

YYHC Китайская фабрика с хорошей производительностью коммерческих электромобильных станций зарядное устройство для электромобилей Ac DC зарядная куча
detail_decorate_root#.магия-0{маржа-дно:10px;переполнение:скрытый} detail_decorate_root#.magic-1{border-bottom-style:solid;border-bottom-color:#53647a;font-family:roboto;font-size:24px;color:#fff;background-color:#696cb4;text-align:center;font-style:normal;font-weight:bold;border-bottom-width:2px;padding-top:8px;padding-bottom:4px}#detail_decorate_root

Зонд для приготовления барбекю в духовке из нержавеющей стали, термометр для измерения температуры мяса на 200 °C
совершенно новый и высококачественный оотдти совершенно новый и высококачественный материал: нержавеющая сталь удобный в переноске, красивый и долговечный температура размер

Датчик температуры, измерительный циферблат, термометр для духовки для приготовления барбекю, высокоточный челночный корабль
характеристики: ootdty достигайте точного контроля температуры с помощью термометра для горячего барбекю, гарантируя идеальное приготовление блюд каждый раз. изготовленный

Sino /comnav T10 GNSS RTK с 1590 каналами и IMU GPS RTK для двухчастотной геодезии
detail_decorate_root #.magic-0{border-bottom-style:solid;border-bottom-color:#53647a;font-family:roboto;font-size:24px;color:#53647a;font-style:normal;border-bottom-width:2px;padding-top:8px;padding-bottom:4px}#detail_decorate_root .магия-1{маржа-дно:10px;линия-высота:0}#detail_decorate_root .магия-2{ширина:750px;высота:629.9524564183835

Монетный Микроскоп DM9H с 7-дюймовым IPS-Экраном с 1200-Кратным Увеличением, Паяльный Микроскоп с Удлиненной 8,5-Дюймовой Подставкой, Цифровой Микроскоп Windows
этот 7-дюймовый жк-цифровой микроскоп является отличным инструментом для взрослых, будь то для обслуживания или наблюдения, он не только может делать фотографии и видео, записывать красивые

Беспроводное управление затвором Joopic дистанционный запуск для DSLR Селфи с помощью камеры управление смартфоном
примечание: прилагаемая упаковка на видео приведена только для справки, фактическая упаковка имеет преимущественную силу камера в комплект не входит по поводу оплаты 1) мы


Модуль Декодирования Голоса MT8870 DTMF Декодер Плата Дистанционного Управления Телефоном Светодиодные Индикаторы с Контактами и Аудиокабелем
модуль декодирования голоса mt8870 dtmf декодер плата дистанционного управления телефоном светодиодные индикаторы с контактами и аудиокабель технические характеристики: встроенный
Оригинальный объектив USA II-VI Znse 1263030 1204605 0901357 0901358 Гравировальное Оборудование Оптика Co2 Лазерная Фокусировочная Линза
если вы хотите узнать больше о продукте, пожалуйста, свяжитесь со мной в whatsapp: +86 18974870179if вы хотите узнать больше о продукте, пожалуйста, свяжитесь со мной в whatsapp: +86 18974870179 detail_decorate_root#.магия-0{маржа-дно:10px;переполнение:скрытый}

Бандажи Классические Для Ограничения Кровотока, Окклюзионные Тренировочные Бандажи Для Тренировки Мышц Рук И Ног BRF
описание продукта характеристики манжеты hyper recovery bfr полосы с ограничением кровотока (bfr) уменьшают поступление кислорода к мышцам, чтобы снять усталость с мышечных волокон с медленными

Тестер почвы 5 в 1 Тестер солнечного света PH Датчик влажности Измерительный прибор Влажность Окружающей среды Температура Монитор влажности
тестер почвы 5 в 1 тестер ph солнечного света датчик влажности измерительный прибор влажности окружающей среды монитор влажности особенности: почвенный тестер 1,5 в 1 позволяет измерять

Автоматическая Телеграфная клавиша Азбуки Морзе с двумя лопастями CW для пользователей Радиолюбителей для любительского радиолюбителя CW Paddle Key Amateur Black
1. это двусторонний автоматический гаечный ключ с магнитной регулировкой демпфирования с одной стороны.лезвия изготовлены из прочного и долговечного композитного материала из углеродного

Выгодный ассортимент Honeywell XT-XWHM-Y-CN для контроля горючих газов
если у вас есть какие-либо вопросы, пожалуйста, оставьте сообщение или добавьте меня в whatsapp:+86 18525855617, адрес электронной почты: [email protected] detail_decorate_root #.magic-0{border-bottom-style:solid;border-bottom-color:#53647a;font-family:roboto;font-size:24px;color:#53647a;font-style:normal;border-bottom-width:2px;padding-top:8px;padding-bottom:4px}#detail_decorate_root
0 Отзывы
Напишите Свое мнение